Module development¶
This page will give some info about the module's internals.
The source code of the module can be found on Github.
Contributing¶
To contribute to the module, you need to clone the repo using Git, and create your branch on Github so you'll be able to make Pull Requests.
C++ code¶
It is recommended to read the Engine Development section on the official Godot Documentation. It explains how to compile the engine, setup an IDE and how custom modules are made.
For code guidelines related to Voxel Tools, see Code Guidelines
Main documentation¶
The documentation is written using Markdown, formatted using Mkdocs and made available as a website on ReadTheDocs.
To contribute to the main pages, make your change to .md files located under the doc/docs folder, and post a PR on Github.
API documentation¶
To contribute to the class reference (API), you may edit XML files under doc/classes instead, similarly to how it's done for regular Godot modules or core classes.
After an XML file has been changed, it can be converted into its Markdown counterpart by using the build.py script in doc/tools, using this command:
python build.py -a
build.py has other arguments to do other things. If you run it without arguments, help will be printed.
Graph nodes documentation¶
Graph nodes of [VoxelGeneratorGraph] are currently not represented with Godot classes. Therefore they use their own documentation in an XML file, using a workflow similar to classes. The XML file is the single souce of truth for node descriptions and categories shown in the editor, as well as the online documentation.
The XML file can be generated or updated from nodes present in the engine by running Godot with the following argument:
--voxel_doc_tool src dst
Where src is a path to the original XML, and dst is a path to write the updated XML. Both paths can be the same. This XML file should be already versionned under doc/graph_nodes.xml.
The XML file can then be used to generate several documentations:
- The Markdown documentation, appearing on the website
- The C++ documentation, appearing in the editor
Both are generated by running the script graph_nodes_doc.py from inside doc/tools/.
Layers¶
Main layers¶
This module has 3 main layers:
- Voxel: the voxel engine. Wrapped into
zylann::voxel::namespace. - Util: library of functions, helpers and data structures, which does not depend on Voxel. Wrapped into
zylann::namespace. - Thirdparty: third-party libraries.
Folders¶
The module is divided in several folders, each with different dependencies. Because of this, it is possible to use VoxelMesher, VoxelGenerator or VoxelStream standalone, without needing to use a VoxelTerrain node for example.
| Directory | Description |
|---|---|
| constants/ | Constants and lookup tables used throughout the engine. |
| doc/ | Contains documentation |
| edition/ | High-level utilities to access and modify voxels. May depend on voxel nodes. |
| editor/ | Editor-specific code. May also depend on voxel nodes. |
| engine/ | Contains task management. Depends on meshers, streams, storage but not directly on nodes. |
| generators/ | Procedural generators. They only depend on voxel storage and math. |
| meshers/ | Only depends on voxel storage, math and some Godot graphics APIs. |
| misc/ | Various scripts and configuration files, stored here to avoid cluttering the main folder. |
| modifiers/ | Files related to the modifiers feature. |
| shaders/ | Shaders used internally by the engine, both in text form and formatted C++ form. |
| storage/ | Storage and memory data structures. |
| streams/ | Files handling code. Only depends on filesystem and storage. |
| terrain/ | Contains all the nodes. Depends on the rest of the module, except editor-only parts. |
| tests/ | Contains tests. These run when Godot starts if enabled in the build script. |
| thirdparty/ | Third-party libraries, in source code form. They are compiled statically so Godot remains a single executable. |
| util/ | Generic utility functions and structures. They don't depend on voxel stuff. |
Code¶
In addition to layers reflected by the folder structure, there is an implicit distinction between Godot and this module: if a piece of code does not need to depend on Godot, then it will tend to not depend on Godot.
For example, the implementation of Transvoxel has very little dependencies on Godot. Indeed, it doesn't care what a resource is, doesn't need Variant, doesnt need bindings, doesn't need to use OOP etc. That's why the mesher resource does not contain the logic, but instead acts as a "bridge" between the algorithm and its usage within Godot.
Same for VoxelBuffer: this class is actually not a full-fledged Godot object. It is much lighter than that, because it can have thousands of instances, or even supports being allocated on the stack and moved. It is exposed as a wrapper object instead for the few cases where scripters have to interact with it.
Namespaces¶
| Namespace | Description |
|---|---|
zylann |
General-purpose, not necessarily related to Godot |
zylann::math |
Math utilities |
zylann::godot |
General-purpose Godot utilities |
zylann::voxel |
Voxel engine |
zylann::voxel::ops |
Voxel editing utilities |
zylann::voxel::godot |
Some classes have Godot-specific wrappers in order to be exposed to scripting APIs, which are in this namespace to allow using the same name as in zylann::voxel |
zylann::voxel::magica |
MagicaVoxel functions |
zylann::voxel::pg |
Graph processing functionality |
There might be more smaller namespaces that can be documented in code.
Tests¶
Tests are not mandatory, but if there is time to make new ones, it's good to have. Full coverage isn't really a goal, but it's useful when troubleshooting some bugs and ensuring they don't come back.
Internal tests¶
The module contains internal tests in the tests/ folder. No test framework is used at the moment, instead they just run by either printing an error when they fail or not.
Tests will only be compiled if voxel_tests=yes is passed as parameter to the SCons command line.
Tests will run on startup if --run_voxel_tests is passed as command line parameter when launching Godot.
Threads¶
The module uses several background threads to process voxels. The number of threads can be adjusted in Project Settings.
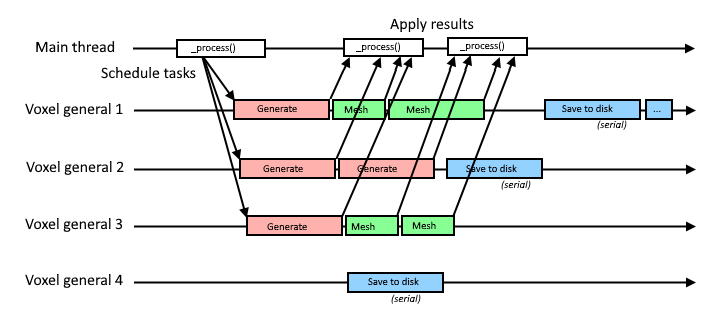
There is one pool of threads. This pool can be given many tasks and distributes them to all its threads. So the more threads are available, the quicker large amounts of tasks get done. Tasks are also sorted by priority, so for example updating a mesh near a player will run before generating a voxel block 300 meters away.
Some tasks are scheduled in a "serial" group, which means only one of them will run at a time (although any thread can run them). This is to avoid clogging up all the threads with waiting tasks if they all lock a shared resource. This is used for I/O such as loading and saving to disk.
Threads are managed in VoxelEngine.
Note: this task system does not account for "frames". Tasks can run at any time for less or more than one frame of the main thread.
Code guidelines¶
Syntax¶
For the most part, use clang-format and follow Godot conventions.
- Class and struct names
PascalCase - Constants, enums and macros
CAPSLOCK_CASE - Other names
snake_case - Globals prefixed with
g_ - Statics prefixed with
s_ - Thread-locals prefixed with
tls_ - Parameters prefixed with
p_, but not really enforced so far. Matters for big functions. - Private and protected fields prefixed with
_ - Some private functions start with
_, either to mimic Godot API, or if it's a re-used function that performs no checks - Signal handler functions are prefixed with
_on_and should never be called manually - Enums prefixed by their name. Example:
enum Type { TYPE_ONE, TYPE_TWO } - Open braces at the end of line, close them next line
- Never omit braces
- Space between binary operators and control flow:
if (a + b == 42) - Indent with tabs
- Private wrapper functions can be used to adapt to the script API and are prefixed with
_b_. - Use Clang-format to automate most of these rules (there should be a file included at the root of the C++ project)
- Prefer comments with
//only - Some virtual functions from wrapper classes are prefixed with
_zn_to encapsulate signature differences when compiling as a module or as a GDExtension.
File structure¶
- Use
.hfor headers and.cppfor implementation files. - File names use
snake_case. - Constructors and destructors go on top
- Public API goes on top, private stuff goes below
- Bindings go at the bottom.
- Avoid long lines. Preferred maximum line length is 120 characters. Don't fit too many operations on the same line, use locals.
- Defining types or functions in
.cppmay be better for compilation times than in header if they are internal.
C++ features¶
- Don't use
autounless the type is impossible to express or a long template (like STL ones). IDEs aren't granted (Github reviews and diffs) - Moderate use of lambdas and functors are fine. Not
std::function. - Lambda captures should be defined explicitely (try to reduce usage of
[=]or[&]) - STL is ok if it measurably performs better than Godot alternatives.
- Initialize variables next to declaration
- Avoid using macros to define logic or constants. Prefer
static const,constexprandinlinefunctions. - Prefer adding
constto variables that won't change after being initialized (function arguments are spared for now as it would make signatures very long) - Don't exploit booleanization when an explicit alternative exists. Example: use
if (a == nullptr)instead ofif (!a) - If possible, avoid plain arrays like
int a[42]. Debuggers don't catch overruns on them. Prefer using wrappers such asFixedArrayandSpan. - Use
uint32_t,uint16_t,uint8_tin case integer size matters. - If possible, use forward declarations in headers instead of including files
#includewhat you use, don't assume a header transitively includes things. This has been broadly ignored for a while, but new code may follow it.util/godotmicro-headers are an exception.- Don't do
using namespacein headers (Except withgodot::, but that's only to help supporting GDExtension using the same codebase, since Godot core does not have this namespace). mutablemust ONLY be used for thread synchronization primitives. Do not use it with "cache data" to make gettersconst, as it can be misleading in multi-threaded context.- Use
ZN_NEWandZN_DELETEinstead ofnewanddeleteon types that don't derive from GodotObject. This is intented for code that may be independent from Godot, yet be tracked in Godot's default allocator when used. - Use
ZN_ALLOCandZN_FREEinstead ofmallocandfree. This is intented for code that may be independent from Godot, yet be tracked in Godot's default allocator when used. - Prefer anonymous namespaces instead of
staticfor internal functions that only appear within.cppfiles. - When using standard library containers, prefer aliases from
util/containers/such asStdVector. These are using Godot's allocation functions so memory will be tracked.
Error handling¶
- Exceptions are not used.
- Check invariants, fail early. Use
CRASH_CONDorZN_ASSERTin debug mode to make sure states are as expected even if they don't cause immediate harm. - Crashes aren't nice to users, so in user-facing code (scripting) use
ERR_FAIL_CONDorZN_ASSERT_RETURNmacros for code that can recover from error, or to prevent hitting internal assertions - Macros prefixed with
ZN_are Godot-agnostic and may be used for portability in areas that don't depend on Godot too much.
Performance¶
In performance-critical areas which run a lot:
- Avoid allocations. Re-use memory with memory pools,
ObjectPool, fixed-size arrays or usestd::vectorcapacity. - Avoid
virtual,Ref<T>,String - Don't resize
PoolVectorsorVector<T>, or do it in one go if needed - Careful about what is thread-safe and what isn't. Some major areas of this module work within threads.
- Reduce mutex locking to a minimum, and avoid locking for long periods.
- Use data structures that are fit to the most frequent use over time (will often be either array, vector or hash map).
- Consider statistics if their impact is negligible. It helps users to monitor how well the module performs even in release builds.
- Profile your code, in release mode. This module is Tracy-friendly, see
util/profiling.hpp. - Care about alignment when making data structures. For exmaple, pack fields smaller than 4 bytes so they use space better
Godot API¶
- In areas where performance matters, use the most direct APIs for the job. Especially, don't use nodes. See
RenderingServerandPhysicsServer. - Only expose a function to the script API if it is safe to use and guaranteed to remain present for a while
- Use
memnewandmemdeleteinstead ofnewanddeleteon types derived from GodotObject - Don't leave random prints. For verbose mode you may also use
ZN_PRINT_VERBOSE()instead ofprint_verbose(). - Use
intas argument for functions exposed to scripts if they don't need to exceed 2^31, even if they are never negative, so errors are clearer if the user makes a mistake - If possible, keep Godot usage to a minimum, to make the code more portable, and sometimes faster for future GDExtension. Some areas use custom equivalents defined in
util/.
Compiling as a module or an extension is both supported, so it involves some restrictions:
- Don't include Godot headers directly. Use headers from
util/godot. - Only use APIs that are available to GDExtensions (or the script API). If they exist in both but are different, use wrappers defined in
util/godot.
Namespaces¶
The intented namespaces are zylann:: as main, and zylann::voxel:: for voxel-related stuff. There may be others for different parts of the module.
Registered classes are also namespaced to prevent conflicts. These do not appear in Godot's ClassDB, so voxel-related classes are also prefixed Voxel. Other more generic classes are prefixed ZN_.
If a registered class needs the same name as an internal one, it can be placed into a ::gd sub-namespace. On the other hand, internal classes can also be suffixed Internal.
Version control¶
- Prefer separating commits with logic changes and commits with code formatting
- When doing a PR, prefer to squash WIP commits
Debugging¶
Command line arguments¶
When you start Godot, by default it starts the project manager. When you choose a project from there, it will relaunch itself, but that breaks the debugger's connection. So it is recommended to use command line arguments to directly start Godot in the project and mode you want.
First, make sure Godot is launched within the working directory of your project.
- To debug the game, launch Godot with no argument, and it will start from the main scene.
- To debug a specific scene of the project, launch Godot with the relative path to the scene as command line argument
- To debug the editor, add the
-eargument.
Example of options setup in in VSCode launch.json on Windows:
{
"version": "0.2.0",
"configurations": [
{
"name": "(Windows) Launch",
"type": "cppvsdbg", // For MSVC
//"type": "cppdbg", // For GDB
"request": "launch",
"program": "${workspaceFolder}/bin/godot.windows.editor.dev.x86_64.exe", // Dev build (old target=debug)
//"program": "${workspaceFolder}/bin/godot.windows.editor.x86_64.exe", // Non-dev build (old target=release_debug)
"args": [
"-v", // Verbose output
//"-e", // Editor mode
//"--debug-collisions",
// Run a specific scene
//"local_tests/sqlite/test_sqlite.tscn",
//"local_tests/texturing/test_textured_terrain.tscn"
//"local_tests/texturing/test_texturing.tscn"
],
"stopAtEntry": false,
"cwd": "D:/PROJETS/INFO/GODOT/Games/SolarSystem/Project",
"environment": [],
"visualizerFile": "${workspaceFolder}/modules/voxel/misc/voxel.natvis"
}
]
}
Breakpoint on error¶
It is recommended to use a debugger to have better information when errors or crashes occur. It may be useful to open core/error/error_macros.cpp (in Godot 4.x) and leave a breakpoint in _err_print_error, so that every time an error occurs, the debugger will break in there, providing you with the live call stack and variable states to inspect.
If you debug the editor, Godot tends to print a lot more errors for things that aren't critical, such as making temporary mistakes in the script editor, or trying to index a resource file in the explorer dock and failing for whatever reason. In this case you may either need clean dedicated test projects, or place breakpoints after launch.
Debug print¶
Godot:
#include <core/string/print_string.h>
print_line(String("Hello {0}, my age is {1}").format(varray(name, age)));
Non-Godot:
#include "util/io/log.h"
#include "util/string/format.h"
println(format("Hello {}, my age is {}", name, age));
Pretty printing¶
Godot and the voxel module both use their own container types, in addition to STL's ones. Debuggers often aren't able to inspect them. For example, Godot's Vector<T> class is similar to std::vector<T> but debuggers are unable to let you inspect what's in them.
To fix this, it is usually possible to provide your debugger a file listing special patterns to inspect these types in a more user-friendly way.
In VSCode, the cpp-tools extension supports Natvis files. Godot comes with such a file in platform/windows/godot.natvis. To get pretty printing for Godot types, in your launch.json file, add the following line:
"visualizerFile": "${workspaceFolder}/platform/windows/godot.natvis"
Unfortunately, only one file can be provided at the moment. An issue is open to request support for multiple files. That means if you also want pretty-printing for structures of the voxel module, you have to replace the natvis path with the following:
"visualizerFile": "${workspaceFolder}/modules/voxel/misc/voxel.natvis"
Profile with Tracy¶
This module contains macros to profile specific code sections. By default, these macros expand to Tracy Profiler zones. It allows to check how long code takes to run, and displays it in a timeline.
It was tested with Tracy 0.10.
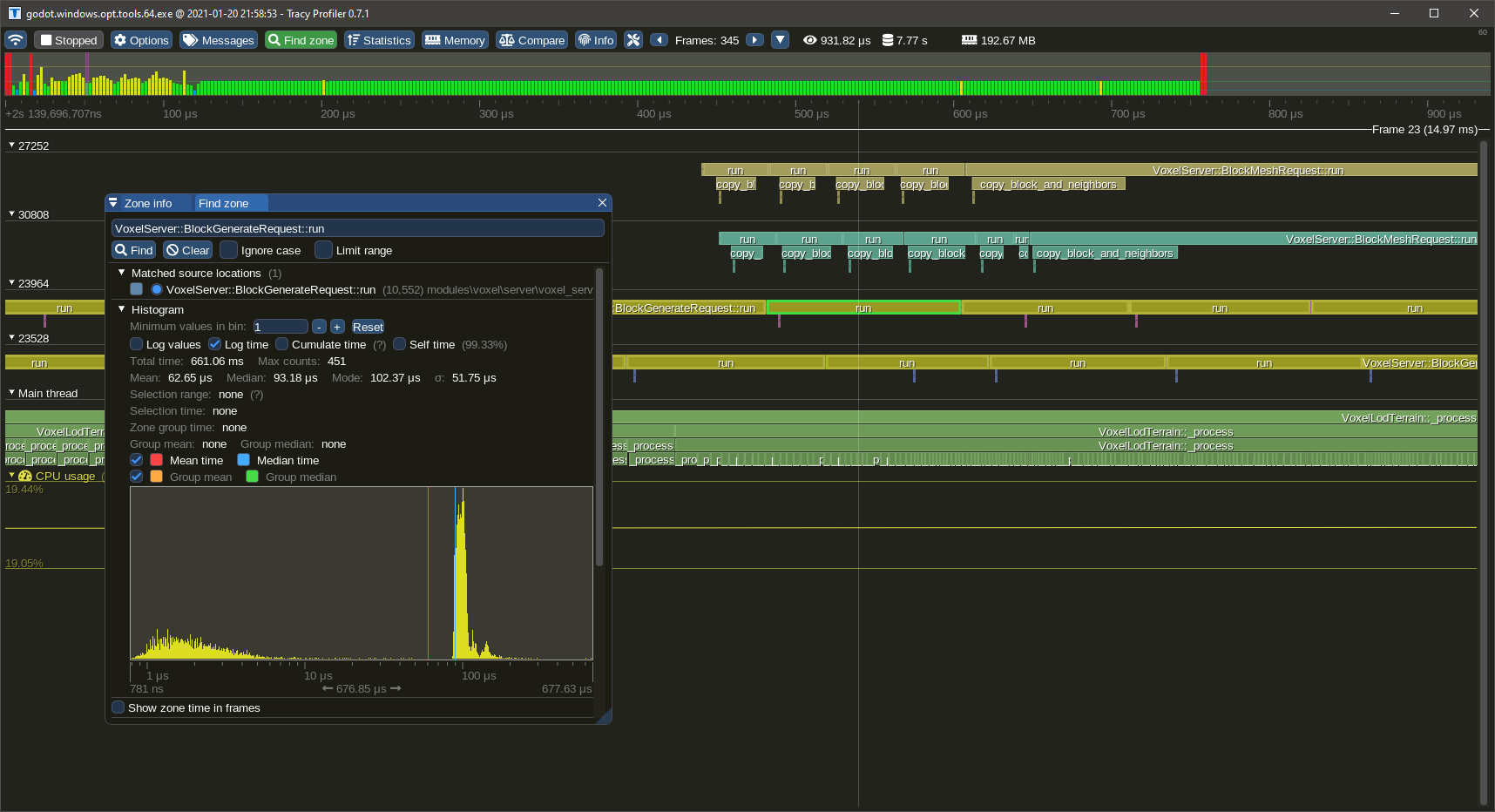
Alternative profilers are also mentionned in the Godot docs. They profile everything and appear to be based on CPU sampling, while Tracy is an instrumenting profiler providing specific, live results on a timeline.
A typical workflow is to launch Tracy, start a connection, and then launch the game, which will establish a connection and record all events. Tracy can also be launched and connect after the game, in which case the data will accumulate inside the game.
Tracy-enabled builds¶
As an experiment, builds of Godot with the module and Tracy integrated are available for Windows, on Github Actions. The file to download will have tracy in the name. Note, you will need a Github account to download it.
These builds not only include a lot of instrumentation for the voxel module, but also include extra instrumentation in various Godot internals. These instrumentations are injected using a script prior to compilation.
Warning
These builds start recording data immediately on startup. That includes the project manager and the editor. It can use a lot of memory (2 Gb just starting the editor). If you only want to profile the game, use the command line to directly launch that build of Godot with your game, or just drop the executable at the root of your project and launch it.
Outside of this case, you have to compile yourself to get Tracy support.
Adding Tracy¶
To add Tracy support, clone it under thirdparty/tracy (Godot's thirdparty folder, not the module).
Then compile the engine by including tracy=yes in the SCons command line.
Tracy isn't a feature of Godot's build system, so internally some of the work is actually done in the voxel module's build script.
Once you are done profiling, don't forget to switch back to a normal build, otherwise profiling data will accumulate in memory without being retrieved.
Note
Tracy has a concept of frame mark, which is usually provided by the application, to tell the profiler when each frame begins. Godot does not provide profiling macros natively, so the frame mark was hacked into VoxelEngine process function. This allows to see frames of the main thread in the timeline, but they will be offset from their real beginning.
Warning
Profiling data can use a lot of memory (can reach gigabytes of RAM), so make sure your computer has enough and keep your session duration in check.
How to add profiler scopes¶
If existing instrumentation isn't enough, you can add more by editing the code.
A profiling scope bounds a section of code. It takes the time before, the time after, and records it into a timeline. In C++ we can use RAII to automatically close a section when we exit a function or block, so usually a single macro is needed at the beginning of the profiled zone. The module already have plenty of them, but you can add yours if you need more insight.
The macros are profiler-agnostic, so if you want to use another profiler it is possible to change them.
You need to include util/profiling.h to access the macros.
To profile a whole function:
void some_function() {
ZN_PROFILE_SCOPE();
//...
}
To profile part of a function:
void some_function() {
// Some code...
// Could be an `if`, `for`, `while`, or a simple block as here
{
ZN_PROFILE_SCOPE();
// Profiled code...
}
//...
}
By default scopes take the name of the function, or file and a line number, but you can give a name explicitely using ZN_PROFILE_SCOPE_NAMED("Hello"). Only compile-time strings are supported, don't use String or std::string.
It is also possible to plot numeric values so they are displayed in the timeline too:
void process_every_frame() {
// Some code...
ZN_PROFILE_PLOT("Bunnies", bunnies.size());
}
Preprocessor macros¶
The module has a few preprocessor macros that can be defined in order to turn off parts of the code getting compiled. Some can be specified through SCons command line parameters.
MESHOPTIMIZER_ZYLANN_NEVER_COLLAPSE_BORDERS: this one must be defined to fix an issue withMeshOptimizer. See https://github.com/zeux/meshoptimizer/issues/311MESHOPTIMIZER_ZYLANN_WRAP_LIBRARY_IN_NAMESPACE: this one must be defined to prevent conflict with Godot's own version of MeshOptimizer. See https://github.com/zeux/meshoptimizer/issues/311#issuecomment-955750624VOXEL_ENABLE_FAST_NOISE_2: if defined, the module will compile with integrated support for SIMD noise using FastNoise2. It is optional in case it causes problem on some compilers or platforms. SCons parameter:voxel_fast_noise_2=yesVOXEL_TESTS: IfTrue, tests will be compiled as part of the build (SCons parameter:voxel_tests=yes). They will run on startup if the--run_voxel_testscommand line argument is passed.ZN_GODOT: must be defined when compiling this project as a module.ZN_GODOT_EXTENSION: must be defined when compiling this project as a GDExtension.
Shaders¶
The module contains shaders for some of its features, mainly compute shaders. They are found under the shaders/dev/ folder.
shaders/dev contains a Godot project. The purpose of this project is mainly to quickly test if shaders compile properly, and eventually test them with simple scenes and GDScript code.
There are several ways shaders are written:
- Plain: regular shaders, which will be used as-is.
- Templates: these contain
<PLACEHOLDER>sections, which the engine will replace with generated code. Code inside those sections will be replaced and is only present to make the shader compile in the test project. - Snippets: these contain
<SNIPPET>sections, which will be inserted into templates or other generated code. Code outside those sections will not be used and is only present to make the shader compile in the test project.
Shipping external files when compiling as a module is inconvenient, so instead they are embedded in C++ directly, similarly to how Godot does. A script can be executed to update those generated files. You must open a command line inside the shaders/ folder and run python text2cpp.py.
Currently, C++ code generating shaders is intertwined with the contents of those shaders. For example, C++ strings in code generation can contain variable names found in GLSL files, so you should have both open to understand the context.
Using the module from another module¶
Writing a custom C++ module directly in Godot is one way to access features of Godot and the voxel engine more directly, which can be better for performance and more stable than a GDExtension. You can do this too if you want to create a custom generator, mesher, stream, or just use components of the module, without having to modify the module directly.
You can include files from the voxel module by using modules/voxel/ in your includes:
#include <modules/voxel/storage/voxel_buffer.h>
You will also need to define preprocessor macros in your SCsub file:
env_yourmodule.Append(CPPDEFINES = [
'ZN_GODOT'
])
GDExtension¶
Warning
This feature is under development and is not ready for production. It has bugs and can crash the engine. Check the issue tracker for work in progress.
This module can compile as a GDExtension library. This allows to distribute it as a library file (.dll, .so...) without having to recompile Godot Engine. TODO: Godot's documentation doesn't seem to contain information about GDExtension yet. For now, you can check this old news and the GodotCpp repository.
To compile the library:
- Download a copy of GodotCpp
- In the voxel module's root directory, write the path to GodotCpp at the beginning of the SConstruct script, or set the environment variable from command line.
- Open the same kind of console you would use to compile Godot, change directory to the voxel module's root folder, and run SCons there. It will use the SConstruct file instead of SCsub. The library will be saved under a bin/ folder.
Example of build command on Windows (unoptimized debug build for use in editor):
scons platform=windows target=debug -j4
The built library will be placed inside the project/ folder, which contains a Godot 4 project. It is then possible to open it to test the extension. Note that it might not be setup for all platforms yet (so far Windows 64-bits is setup).
There are a number of issues to address before this target can be usable. The extension is able to run, but there are known issues. Check the issue tracker for work in progress.